郝建颖同学在全息存储研究中取得新进展
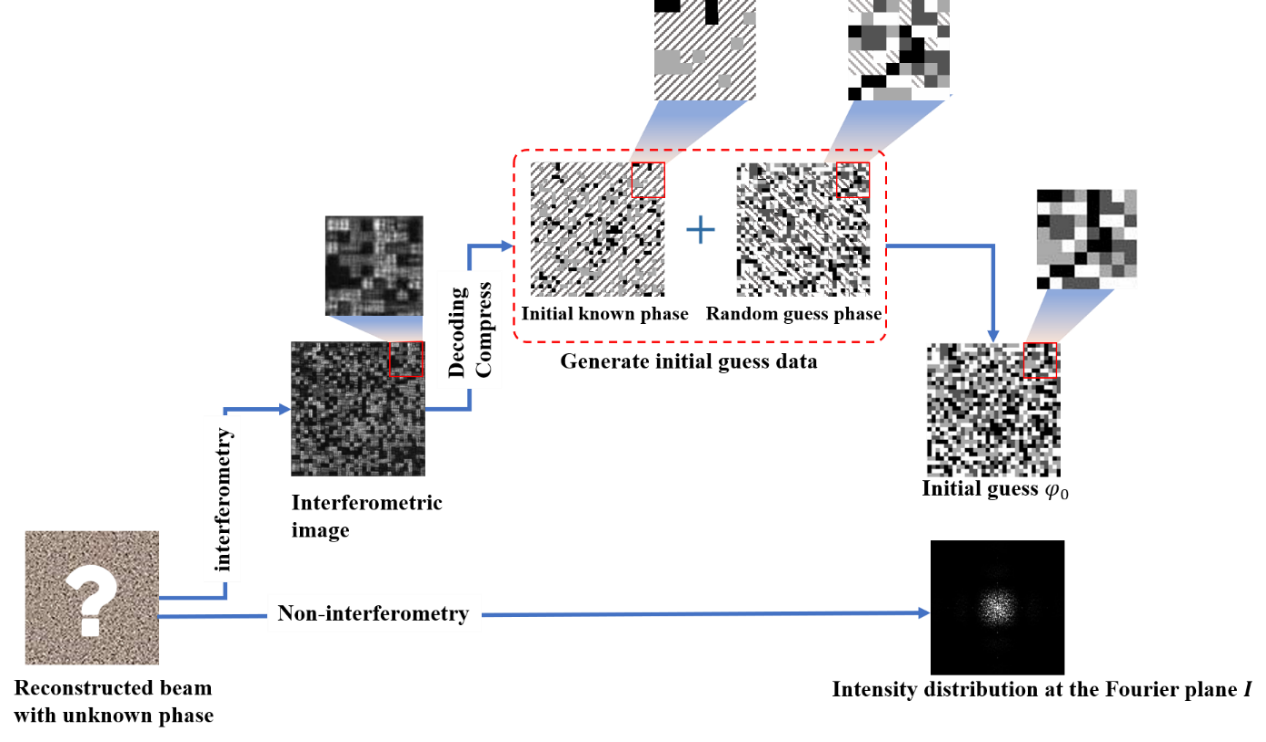
非干涉式相位重建作为相位调制全息数据存储的一项基本技术,具有易于实现,系统设置简单,噪声容限高的优点。通常,非干涉相位重建需要数百次迭代才能准确地获取相位,通过在相位数据页添加嵌入式数据的强约束条件可以大大减少迭代次数。但是嵌入式数据的引入会降低系统的编码率。我们提出了一种单次干涉与非干涉相结合的迭代傅里叶变换(IFTA)相位重建方法。利用单次干涉获得的部分相位解码结果作为非干涉方法的初始相位猜测,然后利用非干涉法IFTA实现相位的快速恢复。与嵌入式迭代傅里叶变换方法相比,该方法不需要占用数据编码页的空间进行嵌入式数据的存储,因此编码率和数据传输速率得以提高。在本文中,我们记录了4阶相位编码并进行了正确重建。通过20次迭代,相位恢复误码率(BER)小于1%。与嵌入式迭代傅里叶变换方法(50%嵌入式数据)相比,编码率提高了两倍。 算法实现过程如图1所示,干涉法生成重建光束的灰度图像,利用干涉灰度图像解码部分相位数据,与随机猜测相位数据组成嵌入式初始相位猜测数据页φ_0。通过探测器获得重建相位的傅里叶变换强度I。利用非干涉法IFTA迭代计算获得数据页相位φ。 |
|
| 图1 干涉法与非干涉法相结合相位恢复过程 |
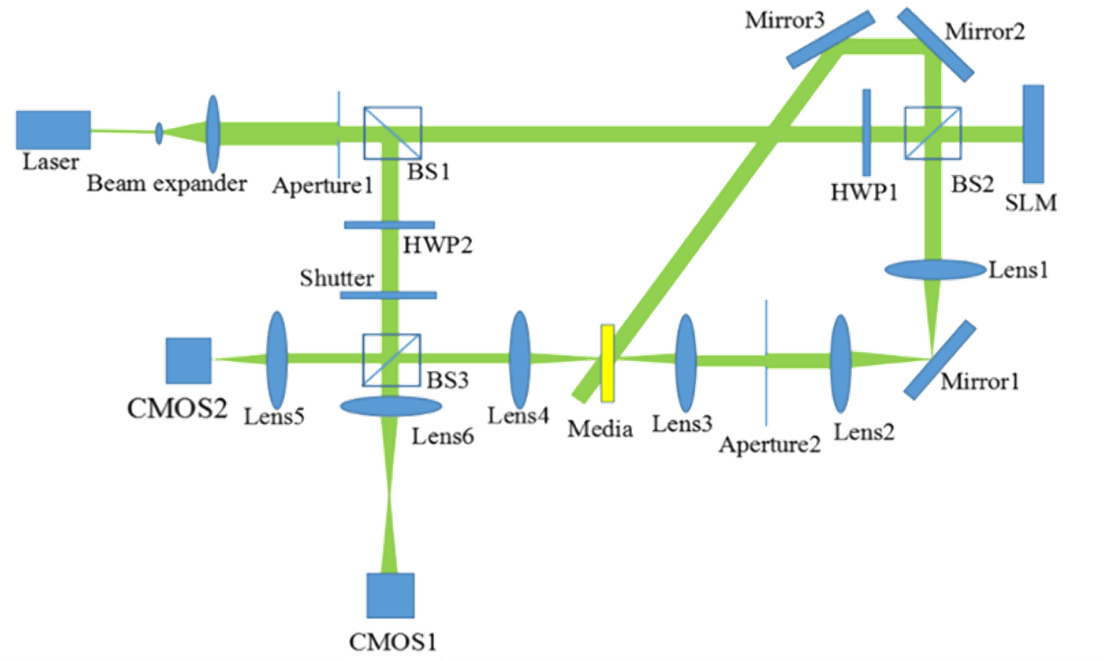
利用图2所示的离轴全息数据存储系统验证该方法可行性。BS1将激光束(λ= 532nm)分读出光束和记录光束。BS2将记录光束被分成信号光束和参考光束。CMOS1相机用于捕获干涉式灰度图像, CMOS2用于捕获重建光束的傅立叶变换强度。使用快门控制CMOS1和CMOS2分别工作。 |
|
| 图2 光学系统设置HWP:半波片,BS:分束器,SLM:空间光调制器,Lens1-Lens4 = 150mm,Lens5 = 50mm,Lens6 = 250mm。 SLM(Holoeye,PLUTO-VIS):像素大小=8μm,分辨率= 1920×1080。CMOS1(Thorlabs,DCC1545M-GL):像素大小=5.2μm,分辨率= 1280×1024。 CMOS2(Sony,ICX445):像素大小=3.75μm,分辨率= 1288×964。 介质是Irgacure 784掺杂的PMMA光敏聚合物,厚度为1.5mm。 |
20次迭代之后,相位恢复和误差分布的结果分别如图3(b)和图10(c)所示。相位恢复误差为0.68%,可以接受。 |

|
| 图3 (a)初始相位,(b)重建相位,(c)重建相位误差 |
相关研究的结果以“Fast phase retrieval with a combined method between interferometry and non-interferometry in the holographic data storage ”为题,整理发表在美国光学工程学会(The International Society for Optics and Photonics, SPIE)期刊杂志 Optics Engineering. Vol.59, No.10, 102415 (2020)上。 论文的相关链接:https://doi.org/10.1117/1.OE.59.10.102415 |

|
(2020.03.19)
